














? 內(nèi)置驅(qū)動與控制電路,采用雙向出軸42BYG直流電機(jī),同時支持電動/手動雙模式;
? 內(nèi)置PID控制功能,加減速曲線平滑,運(yùn)動執(zhí)行器啟停進(jìn)退平穩(wěn),無頓挫感;
? 驅(qū)動脈沖默認(rèn)采用256x細(xì)分,從而使運(yùn)動平臺運(yùn)行平穩(wěn),安靜,穩(wěn)定;
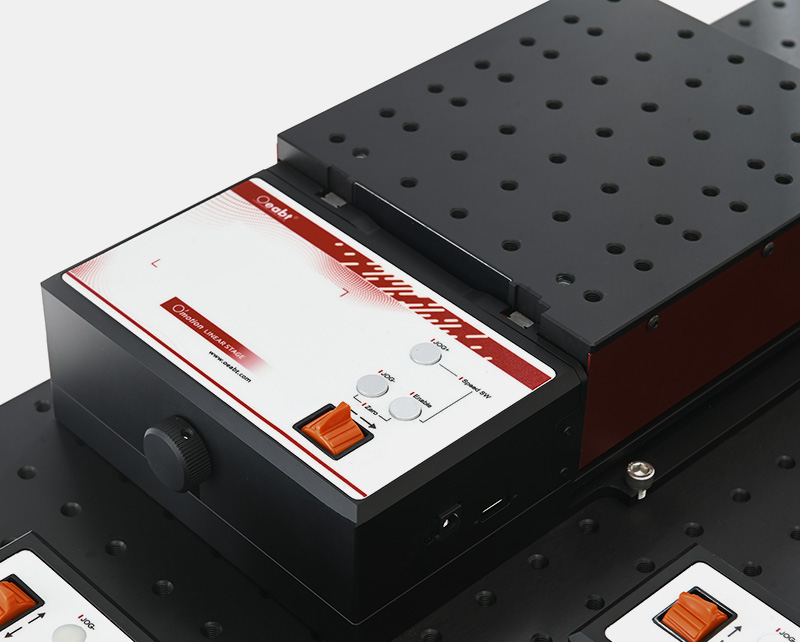
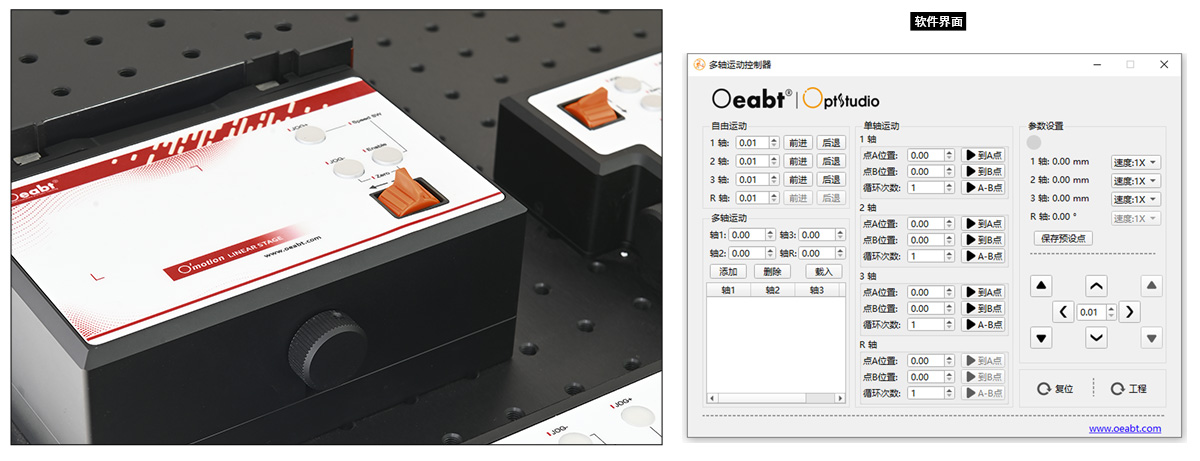
? 采用霍爾操縱桿,可對直線運(yùn)動平臺進(jìn)行實(shí)時的、線性的、平滑的無級加減速控制;
? 支持點(diǎn)動、慢跑、霍爾無級變速前后進(jìn)給等自由運(yùn)動控制模式;
? 支持記憶斷電前行程位置功能,重啟后不自動歸零(可手動操作);
? 通過組合按鍵執(zhí)行電機(jī)復(fù)位及速度切換(快慢兩檔);
? 支持通過USB串口通信與上位機(jī)程序程序交互,通信協(xié)議采用ASCII O’motion指令集;
? 支持在Windouws/Linux/MacOs/Android等操作系統(tǒng)下開發(fā)上位機(jī)控制程序,實(shí)現(xiàn)跨平臺應(yīng)用;
? 提供windows版本的上位機(jī)控制程序樣例及通信協(xié)議文檔,方便用戶進(jìn)行二次開發(fā)或系統(tǒng)集成;
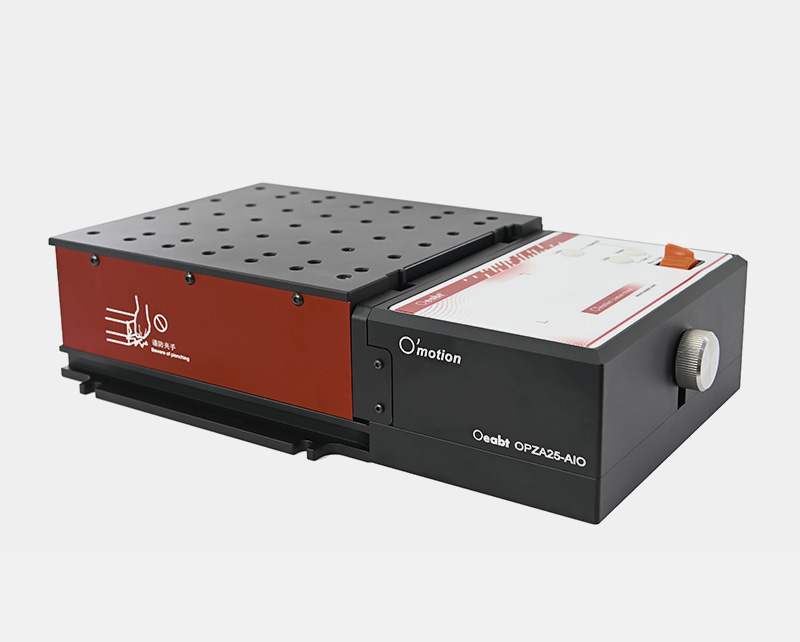
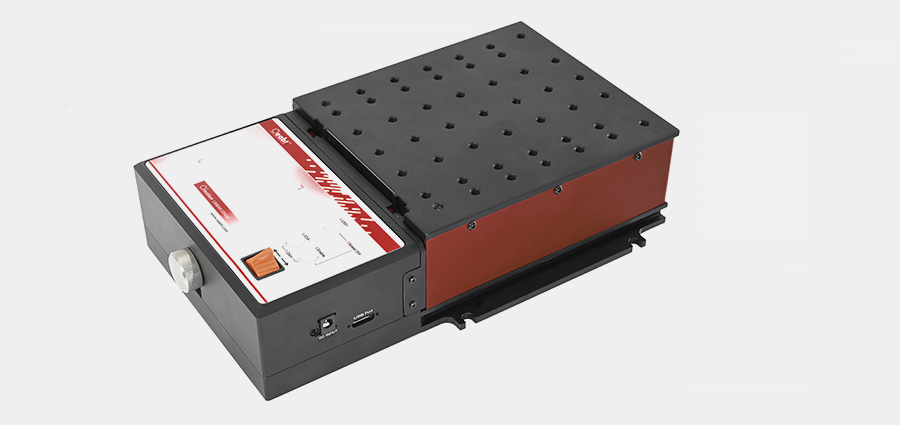
驅(qū)動控制一體的亞微米級分辨率升降平臺,為需要微小增量垂直運(yùn)動的應(yīng)用提供了理想解決方案
|
規(guī)格 |
286.0*181.5*72.3mm |
|
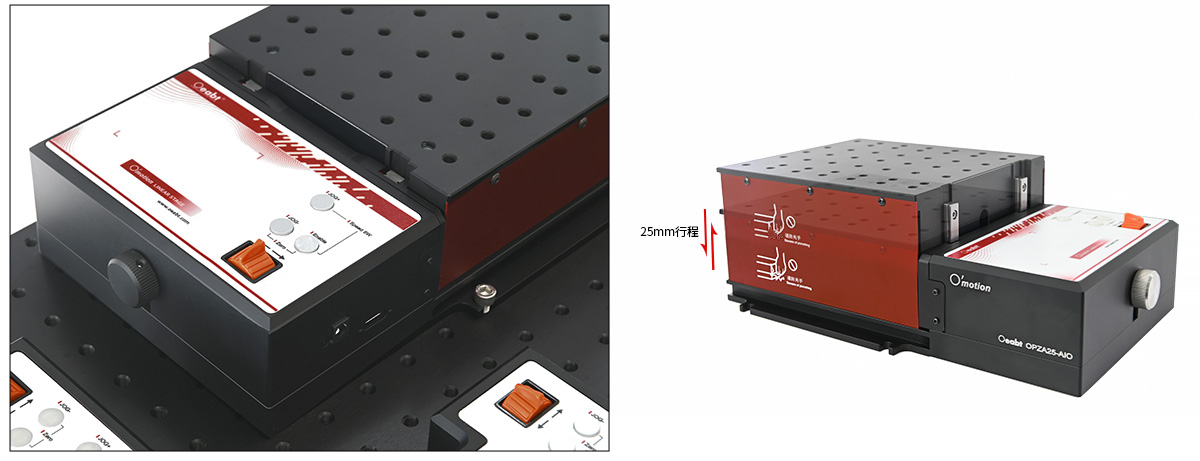
升降行程 |
25mm |
|
平臺高度 |
最低平臺高度:72.3mm;最高平臺高度:99mm |
|
臺面尺寸 |
178*160mm |
|
絲杠類型 |
?12mm 精密滾珠絲杠,導(dǎo)程2mm |
|
導(dǎo)軌形式 |
雙直線導(dǎo)軌 |
|
負(fù)載能力 |
建議值≤65磅(30kg) |
|
精度性能指標(biāo) |
|
|
高速檔速度 |
2.5mm/s |
|
低速檔速度 |
1.83mm/s |
|
點(diǎn)動距* |
82μm |
|
雙向重復(fù)定位精度 |
5μm |
|
反向間隙 |
5μm |
|
平整度 |
≥0.02mm |
|
電氣參數(shù)指標(biāo) |
|
|
電機(jī)類型 |
42BYG直流電機(jī) |
|
步距角 |
1.8° |
|
微步數(shù) |
51200 |
|
工作電壓 |
DC 12 V |
|
工作電流 |
2A |
|
傳感器類型 |
槽型光電傳感器(NPN常開,高電平有效) |
|
控制與通信 |
|
|
控制接口 |
USB串口 |
|
通信協(xié)議 |
ASCII O'motion指令集 |
|
兼容系統(tǒng) |
Windows/Linux/MacOS/Android等 |
|
開發(fā)支持 |
提供Windows樣例程序與協(xié)議文檔 |
|
推薦驅(qū)動器/控制器 |
O’motion 單軸步進(jìn)運(yùn)動控制器、O’motion 四軸運(yùn)動控制系統(tǒng) |
注*:最高、最低運(yùn)動速度及點(diǎn)動距取決于運(yùn)動控制器的脈沖頻率及設(shè)定,因此上述*號標(biāo)注參數(shù),均為采用Oeabt? O’motion 四軸運(yùn)動控制系統(tǒng)下的測試結(jié)果。



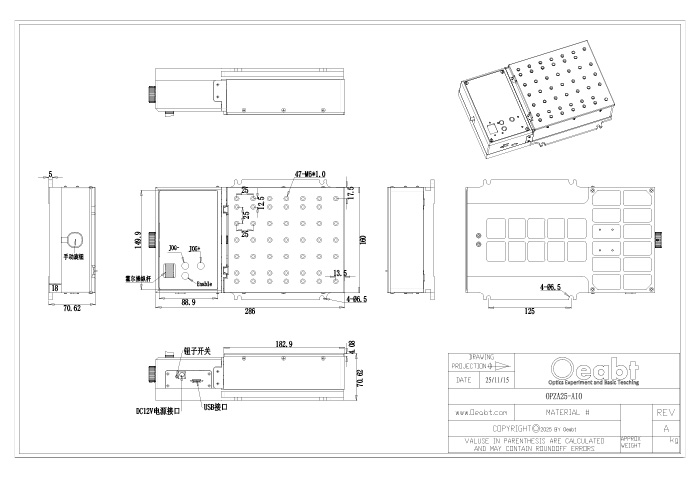
 OPZA25-AIO 工程圖下載
OPZA25-AIO 工程圖下載